
Novi pristup veštačkoj inteligenciji u fizičkom svetu znatno ubrzava sposobnost robota da usvoje i usavrše nove veštine. Toyota, MIT i Columbia Engineering su pokazali neverovatne rezultate novog pristupa učenju veštačke inteligencije koji znatno ubrzava brzinu kojom roboti mogu usvojiti nove veštine. Izgleda kao trenutak ChatGPT-a za robotiku.
Mi živimo na samom početku ere opštih namena za robotiku. Kompanije su odlučile da je vreme da ulože veliki novac u humanoidne robote koji mogu autonomno da se kreću po postojećim radnim prostorima i polako preuzimaju zadatke od ljudskih radnika.
Većina ranijih scenarija upotrebe, međutim, spada u ono sto bih nazvao kategorijom Planet Fitness: roboti dižu stvari i spuštaju ih. To će biti sjajno za logistiku u stilu skladišta, utovar i istovar kamiona i paleta i slično, kao i za premestanje stvari u fabrikama. Ali to nije tako glamurozno, i svakako ne pruža korisnost kao radnik.
Da bi ove sposobnosti proširile na toliko nivoa da roboti mogu da se kreću bilo gde i počnu da preuzimaju različite zadatke, moraju naći način da brzo unaprede svoje veštine na osnovu ljudskih instrukcija ili demonstracija. I to je tačka gde Toyota tvrdi da je napravila veliki proboj, sa novim pristupom učenju zasnovanom na konceptu Diffusion Policy, koji, prema njihovim rečima, otvara vrata konceptu velikih modela ponašanja.
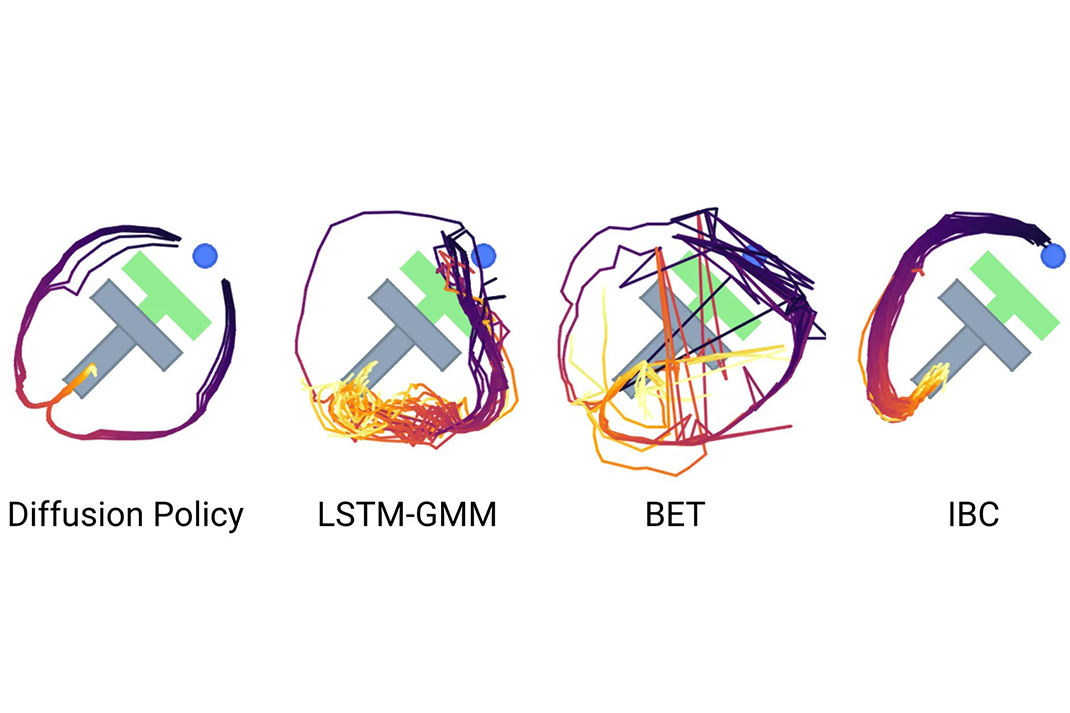
Diffusion Policy je koncept koji je Toyota razvila u saradnji sa Columbia Engineering i MIT-om. Dok veliki modeli jezika (LLM) poput ChatGPT mogu da upiju milijarde reči ljudskog pisanja i da nauče da pišu i kodiraju – i čak razmišljaju – na nivou koji je iznenađujuće blizak ljudima, Diffusion Policy omogućava robotima da posmatraju kako čovek izvodi određeni fizički zadatak u realnom svetu i da se programiraju da ga izvršavaju na fleksibilan način.
Dok su neke startap kompanije podučavale svoje robote putem VR telepresence-a – pružajući ljudskom operateru tačno ono što robot vidi i omogućavajući mu da upravlja rukama robota kako bi obavio zadatak – Toyota je pristupila više fokusirano na haptiku. Operateri ne nose VR naočare, već dobijaju haptičku povratnu informaciju od mekih, fleksibilnih hvataljki robota putem kontrole rukama, što im na neki način omogućava da osete ono što robot oseća kada njegovi manipulatori dolaze u dodir sa objektima.
Kada ljudski operater pokaže robotima kako da obave određeni zadatak nekoliko puta pod različitim uslovima, veštačka inteligencija robota gradi sopstveni interni model kako uspeh i neuspeh izgledaju, a zatim pokreće hiljade simulacija zasnovanih na fizici na osnovu svog internog modela zadatka, kako bi pronašao niz tehnika za obavljanje posla.
Postupak započinje sa demonstracijom malog skupa veština od strane nastavnika putem teleoperacije. AI zasnovana Politika difuzije tada uči u pozadini tokom nekoliko sati. Ako na primer naučimo robota popodne, dozvolimo mu da uči preko noći, i sledećeg jutra imamo novo funkcionalno ponašanje.
Tim je do sada koristio ovaj pristup kako bi brzo obučavao robote u više od 60 malih, uglavnom kuhinjskih zadataka – svaki relativno jednostavan za prosečnu odraslu osobu, ali svaki zahteva da roboti sami otkriju kako da uhvate, drže i manipulišu različitim vrstama predmeta, koristeći razne alate i pribor.
Govorimo o korišćenju noža da jednolično nanesemo namaz na krišku hleba, ili korišćenje spatule da okrene palačinku, ili korišćenje ljuštilice za krompire. Naučio je kako da razvuče testo u podlogu za pizzu, onda da kašikom nanese sos na podlogu i da ga razmaže kašikom.
Toyota kaže da će kontrolisati stotine zadataka do kraja godine, a do kraja 2024. godine planira preko 1000 zadataka. Kao takva, razvija ono u šta veruje da će biti prvi veliki model ponašanja ili LBM – okvir koji će se vremenom proširiti da postane nešto poput robota u obliku telefonskog Chata. Drugim rečima, potpuno AI-generisani model kako robot može da interaguje s fizičkim svetom da bi postigao određene rezultate, koji se manifestuju kao ogromna količina podataka koja je potpuno nečitljiva ljudskom oku.
Tim efektivno implementira postupak kojim će budući vlasnici i operateri robota u svim vrstama situacija moći brzo da nauče svoje robote novim zadacima po potrebi – nadograđujući čitave flote robota novim veštinama kako napreduju.
Ono što je tako uzbudljivo kod ovog novog pristupa je brzina i pouzdanost s kojom možemo dodavati nove veštine. Zato što ove veštine direktno rade sa slikama sa kamere i taktilnim osetilima, koristeći samo naučene predstave, oni su sposobni da dobro izvršavaju čak i zadatke koji uključuju deformabilne objekte, tkanine i tečnosti – koje su tradicionalno bile izuzetno teške za robote.